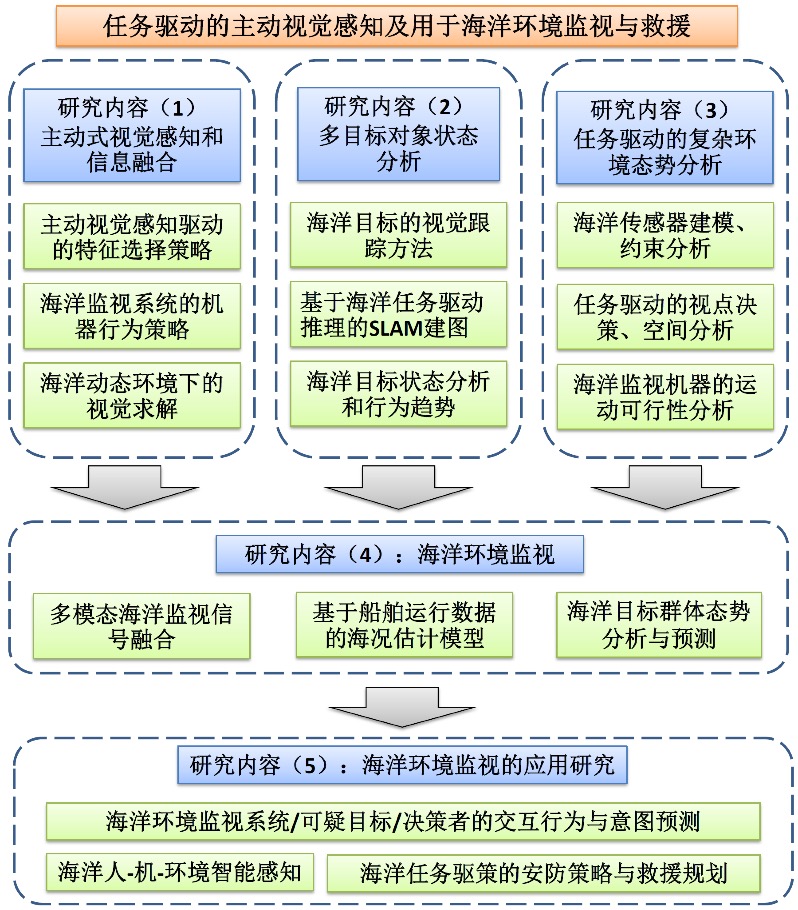
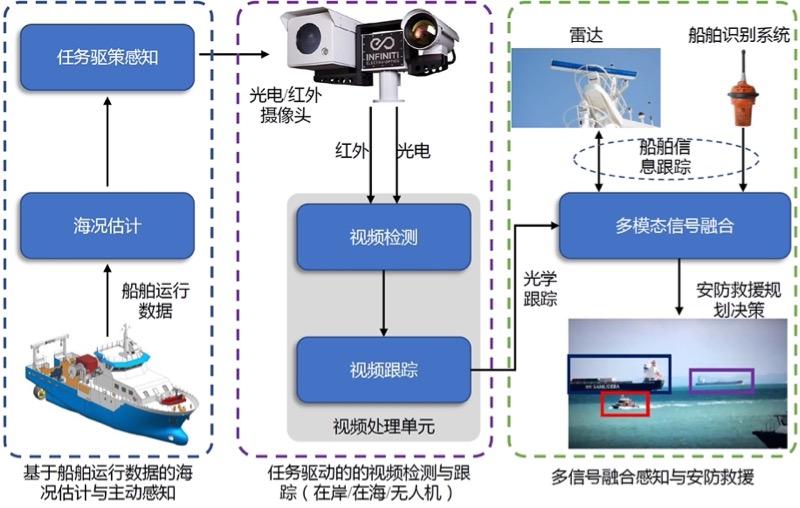
项目介绍:针对海洋安防救援方面的应用背景,在机器视觉与智能感知领域开展理论创新研究,重点考虑对各类海洋及海岸线附近目标进行有效的信息感知和计算理解,实现海洋环境的智能化状态监测,并为安防救援等任务提供科学的决策依据。由于现实中的复杂海洋环境给视觉理解和任务决策带来了很大的理论与技术困难,如何科学合理地融合多源信息,并基于此开展任务驱动的智能化海洋环境监测和救援尤为关键。项目基于中方已承担的重点基金和国家杰出青年基金等项目的相关研究工作积累,利用挪威团队在海洋机器人领域的优势,双方密切结合,强强合作,优势互补,开展研究攻关科学问题。项目对海洋信息智能感知理解方面问题深入探索,拟采用主动式视觉感知和信息融合模型、海洋多目标对象状态分析、任务驱动的海洋环境态势感知等技术,开展海洋监视机制和安防救援相关的科学依据探索,发现相应的策略规划方法。