项目:1. 浙江省科技厅公益项目,“基于实时立体视觉的智能机器人导盲系统”,10万元,2014-2016。2. 华电电力研究院,“基于红外双视技术的圆堆人员安全防护及自燃预警系统的研究开发”,100万元,2018-2019。3. 杭州德泽机器人科技有限公司,“断骨对接空间位姿追踪”,28万元,2018-2019。4. 堆取料自动控制算法及其软件系统,技术服务项目,JH-2019-0257,2020.04至2020.12,华电电力科学院,46万。5. 国家自然科学基金委,...
项目:1.国家自然科学基金青年项目,“基于自适应外观模型及深度强化学习的视觉跟踪”,2019。2.天津市自然科学基金青年项目,“基于动态语义化信息描述和深度强化学习决策机制的目标跟踪”,2020。3. 国家级重点基础研究项目课题,内嵌视觉知识的智能机器系统,576万,2021.01-2024.01。4.《基于深度学习的特征融合在移动机器人视觉中的场景理解及研究》,国家自然科学基金,研究经费:44万;项目批准号:61463032;研究期限:...
项目:1.浙江省自然科学基金探索项目,“基于空地多源多模态主动感知的复杂环境精确重建”,9万元,2020-2022。2.国家自然科学基金项目-面上,“动态视觉认知子空间构建与应用”,64万元,2019-2022。3.国家自然科学基金青年基金,“面向未知环境探索的类别独立对象检测”,23万元,2014-2016。4.浙江省科技厅公益项目,“基于实时立体视觉的智能机器人导盲系统”,10万元,2014-2016。5.教育部博士点基金,“基于动态认知层次...
项目:1.国家级重点基础研究项目课题,内嵌视觉知识的智能机器系统,576万,2021.01-2024.012.2.国家自然科学基金青年项目, 复杂背景中行人目标的4D光场视觉感知机制与识别方法研究,61906033,24万,2020.01-2022.123.教育部重点实验室开放基金,透过随机介质的多点超衍射聚焦机理与光波前反馈控制方法研究,1万,2019.04-2020.034.国家部委级技术基础项目,基于飞秒激光的精密测量技术研究,30万,2014.01-2014.125.局级青年...
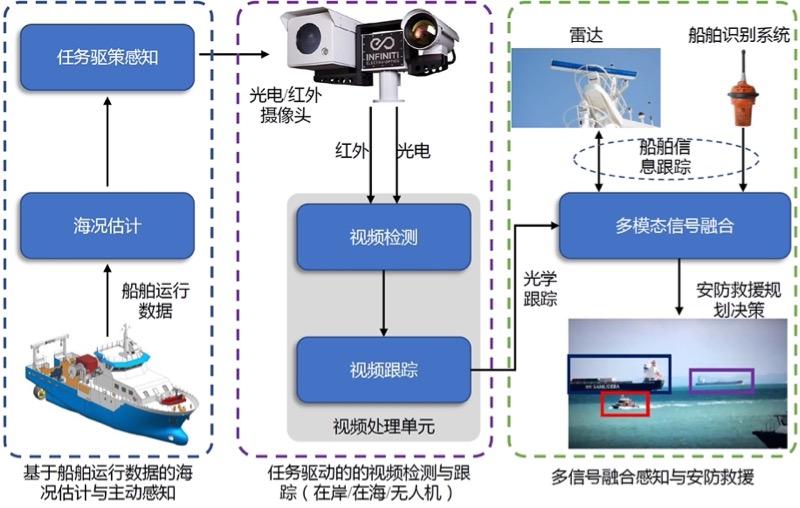
项目介绍:针对海洋安防救援方面的应用背景,在机器视觉与智能感知领域开展理论创新研究,重点考虑对各类海洋及海岸线附近目标进行有效的信息感知和计算理解,实现海洋环境的智能化状态监测,并为安防救援等任务提供科学的决策依据。由于现实中的复杂海洋环境给视觉理解和任务决策带来了很大的理论与技术困难,如何科学合理地融合多源信息,并基于此开展任务驱动的智能化海洋环境监测和救援尤为关键。项目基于中方已承担的重点...

项目简介:针对真实场景的视频恢复中,标签获取难度高、深度学习算法泛化效果差等问题,本项目拟以腔镜视频去雾为实际场景,探索不配对(unparied)数据集的弱监督学习方法。项目负责人拟围绕弱监督视频恢复中的三个关键科学问题展开研究:域不变特征提取、非线性时空特征相似度建模及多时空非线性特征间的一致性计算。本项目的研究成果将为面向真实场景的视频恢复领域提供新的研究思路和方法。The Intervention Center, Oslo U...

项目介绍:长非编码RNA(lncRNA)在生物生命活动中往往通过与蛋白质这样具有活性的生物大分子及其他分子相互作用实现其功能。在数据和算力不断增长的背景下,本项目出发点是用机器学习等智能计算方法,加快数据分析,降低成本。相比单信息源和单度量方式,本课题专注更有挑战性的多源数据协同表示学习、多相似性度量及迁移学习等方法应对高维小数据问题,从而提供更可靠的估计和判断。本课题内容包括:①将多源生物分子信息协同...

项目介绍:共享编码器先用一个卷积层从当前视频帧、前一帧语义分割图和传输率图中提取出浅层特征信息,再使用编码器进一步提取深度特征信息。语义分割解码器和传输率解码器具有相似的网络结构,都先进行解码预再通过卷积操作,最后分别预测语义分割图和传输率图。为了缓解由编解码器中下/上采样导致的信息损失,我们使用长程跳连(Long Skip Connection)将共享编码器中的信息引流至语义分割解码器和传输率解码器,以充分利用卷积...
ABSTRACTIn light field imaging techniques, the abundance of stereo spatial information aids in improving the performance of salient object detection. In some complex scenes, however, applying the 4D light field boundary structure to discriminate salient objects from background regions is still under-explored. In this paper, we propose a light field boundary-aware and cascaded interaction networ...
论文链接:Consistency-Aware Graph Network for Human Interaction Understandin
Jialing Liu, Ruyu Liu, Kaiqi Chen, Jianhua Zhang*, Dongyan Guo, Collaborative Visual Inertial SLAM for Multiple Smart Phones, IEEE Conference on Robotics and Automation (CCF B), 2021
Abstract— At present, sign language recognition (SLR) researchers are mainly committed to establishing a sign language recognition model based on single-mode data. Nevertheless, this manipulation often leads to a defective understanding of the sign language semantics and ignoring some visual information. In a nutshell, the challenges locate redundancy removing and the alignment of the sign lan...

|

|

|